
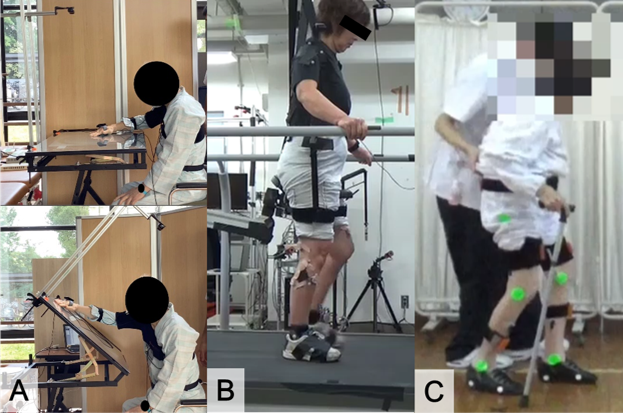
障がい後の変容した運動制御と運動パフォーマンスの理解
リハビリテーションは、病気、けが、加齢などによる障がいや後遺症を改善し、自立した日常生活や社会復帰を目指す治療訓練の総称です。 近年、科学的根拠に基づく運動療法の重要性が認識される中、本研究では、高次脳機能障害や整形外科疾患の様々な機能障害を対象に、 動作拙劣やパフォーマンス低下を生じる障がい特有の運動制御の機序について理解を目指しています。 知見は、リハビリテーションに伴う運動機能回復の評価や運動機能回復のための介入技術の開発に応用が期待できます。
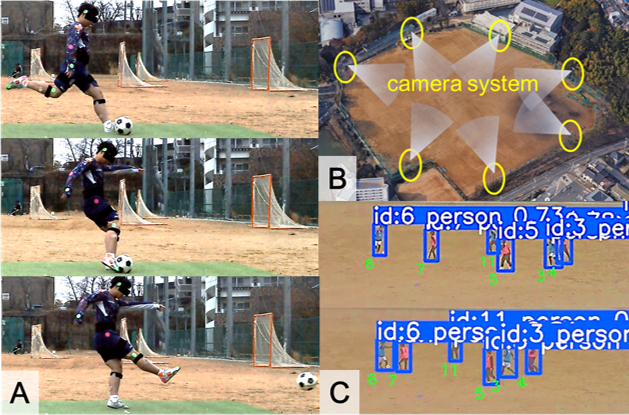
スポーツにおける卓越した運動制御と運動パフォーマンスの理解
人は運動技能の習得や洗練を目的として、しばしば熟練動作を手本とします。 しかし動作の見た目を真似るだけでは所望のパフォーマンスは達成されず、動作に内在する運動制御の要点(コツ)を理解し実行しなければ、技能の改善は見込めません。 本研究では、様々な個人・チームスポーツにおける卓越した動作を題材に、驚異的な運動パフォーマンスを実現するアスリート特有の運動制御の機序に迫ります。 知見は、ハイパフォーマンススポーツの科学や医学、例えばプロ選手のスポーツ外傷・障害後のリハビリテーションやトレーニングの評価に応用が期待できます。
運動学習とトレーニングの科学
リハビリテーションやスポーツにおいて、運動技能の習得や洗練には実践と経験が不可欠です。 現状のトレーニングは療法士や指導者が培った現場の経験や知識に依る所が大きく、課題遂行能力を永続した変化へ導く運動学習の機序については十分に解明が進んでいません。 本研究では、運動学習の基本要素となるプリミティブについて仮説検証し、科学的根拠に基づくトレーニング法の提案および理論と実践の橋渡しを目指します。 知見は、運動機能回復や運動機能拡張のための介入技術の開発に応用が期待できます。
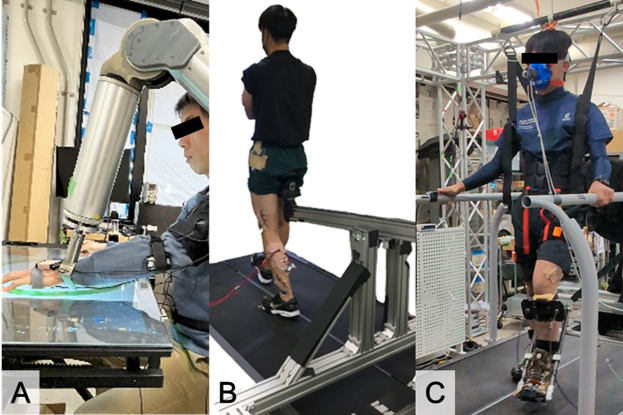
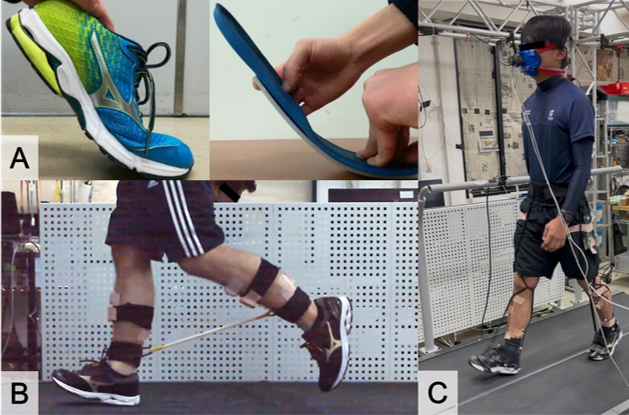
運動機能回復のための介入技術
次世代リハビリテーションの発展において、電気機械装置をトレーニングプログラムに組み込むことは有望な手段の一つです。 これらの装置は利用者の運動学習を促進するように設計されており、病気やけがによって失われた運動機能の回復を促進し、可能な限り効率的な方法で運動技能の再習得や洗練化を手助けします。 本研究では、運動制御や運動学習の知見を活かしながら、利用者の特性にパーソナライズした介入トレーニング法の確立とその科学的根拠の蓄積を目指しています。 知見は、リハビリテーションの質、量、効率の向上に貢献が期待できます。
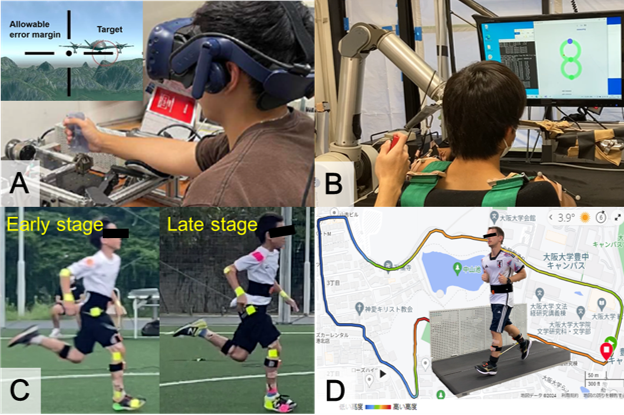
運動機能拡張のための介入技術
人と人工物の融合を目指す人機一体の技術は、身体機能の支援、補完を超え、その能力増強へと展開されようとしています。 人間拡張技術は、人工物によって強化された新奇な身体を提供するとともに従来の運動制御を修飾します。 本研究では、運動制御や運動学習の知見を活かしながら、①身体の機能強化の方法論と②強化された身体を利活用する脳のトレーニング法の確立を目指しています。 知見は、技術駆動型ハイパフォーマンスの科学や医学に貢献が期待できます。
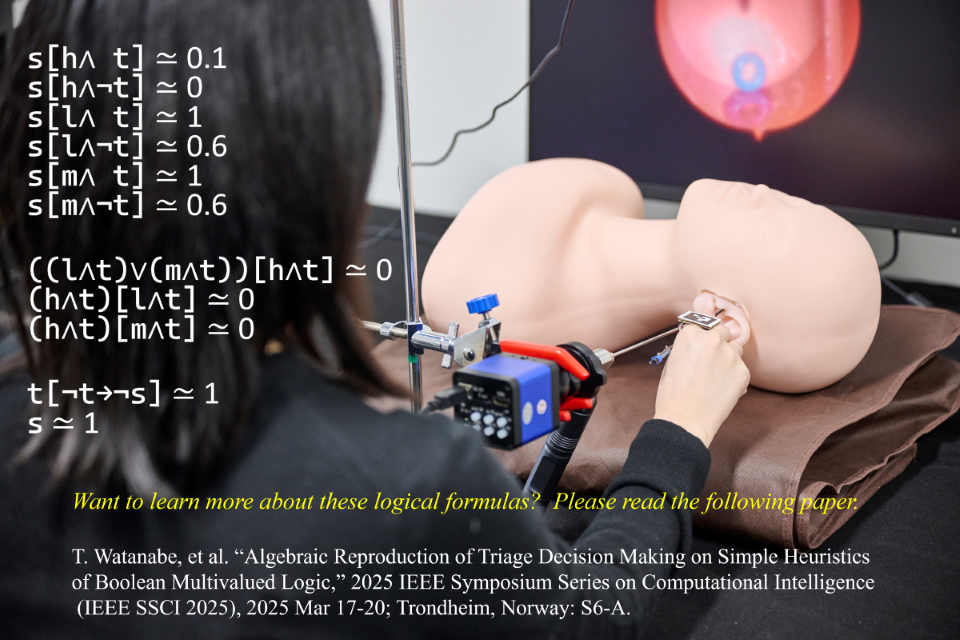
医療従事者の意思決定を代数的に再現し、
医療ロボットの自律レベル向上に展開する研究
近年のAI技術の急速な発展に伴い、自動車の自動運転の研究と同様に「医療ロボットの自律能」に関する議論が盛んになっています。 本研究では、(1)内視鏡耳科手術における術者のカメラ操作タスク、(2)救急医療における究極の意思決定タスクであるトリアージ問題などをとりあげ、医療に携わる人間のさまざまな意思決定を代数的に再現する研究ならびにそれらを医療ロボットの自律レベル向上に応用展開する研究を進めています。
産業用ロボット技術を駆使して、
医療ロボットの高精度位置決め制御技術を創出する研究
高精度自律医療ロボット開発が近未来のチャレンジングな研究課題として注目されていますが、ロボットの位置決め精度向上において、カメラやロボットのキャリブレーションが大きな問題として立ちはだかっています。 本研究では、産業用ロボット分野で開発されたキャリブレーション作業の負担の無いビジュアルフィードバック制御技術を活用して、医療ロボットの新しい高精度位置決め制御手法を研究開発しています。

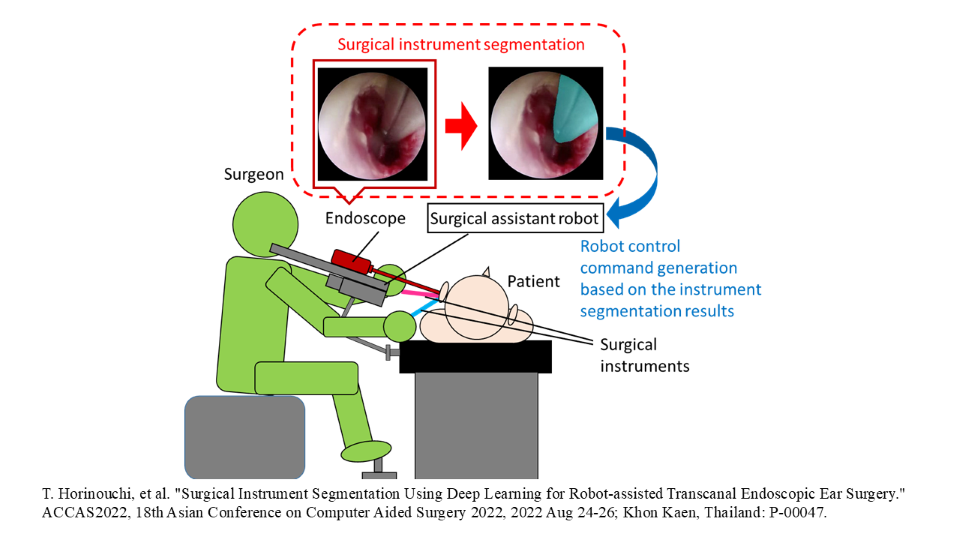
医療ロボット自律化に向けた
術者の意図抽出のための内視鏡画像処理の研究
われわれは、内視鏡手術において術者の傍らで内視鏡を把持操作するロボットの自律化を目指しています。 そのためには、手術中の術者の意図(どのような手術器具を用いてどの部分をどのように操作しているか)に関わるデータを取得する技術の確立が求められます。 本研究では、内視鏡映像内から、手術器具の種類およびその領域情報や、対象臓器の位置ならびに奥行き情報などを高速高精度に推定する画像処理手法の研究開発を行っています。
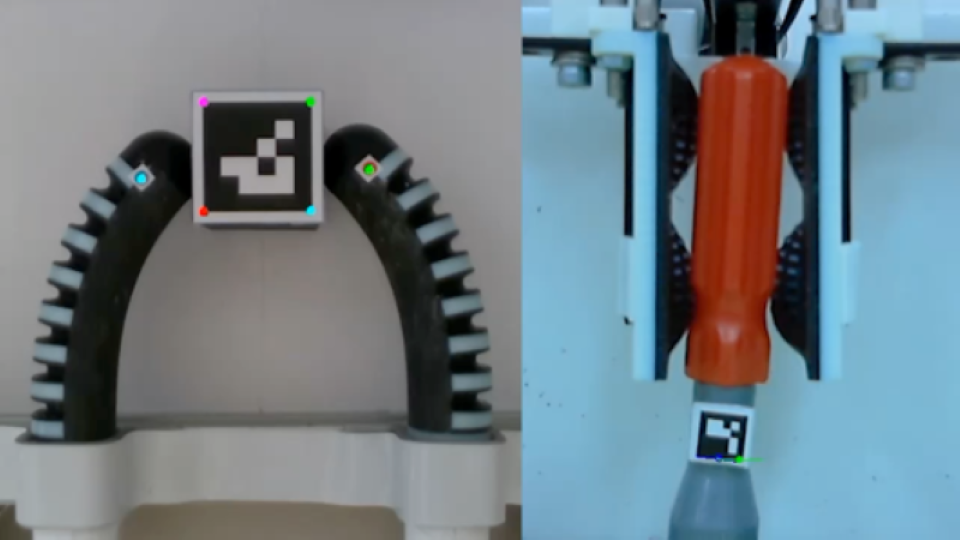
柔軟ロボットハンドの構造と視覚制御の相互作用による
多様把持物体の高精度操作に関する研究
柔軟ロボットハンドは、多様な形状の物体を把持する能力に優れています。 しかし、従来の剛体ロボットハンドが備える精密な把持や器用な操作能力には及ばず、特に高精度な制御を必要とする作業においては依然として課題が残っています。 本研究では、柔軟ロボットハンドの構造設計と制御手法の両面からアプローチし、それぞれの弱点を相互に補完する統合的な解決策を確立することを目指します。 本研究の成果により、柔軟ロボットハンドの応用範囲を大幅に拡張し、より高度な産業用途や日常生活支援への展開を促進することが期待されます。
ロボットシステムによる多様作業の自動化に関する研究
産業界での人手不足解消と生産性向上を実現するため、ロボットシステムによる作業自動化への期待は急速に高まっています。
従来のファクトリーオートメーションの枠組みを超え、変化する環境や複雑な作業に対応することが、依然として大きな課題です。
本研究では、作業環境と内容の特性を理解/整理した上で、認識やハンドリング、動作設計という各側面から新たな自動化戦略を提案することを目的としています。
本研究の成果により、多様な環境下でのシステムインテグレーション技術の進化が期待されます。
